Scienza
Prodotti scientifici di Metis
Metis può acquisire dati da entrambi i canali in luce visibile (VL) e ultravioletta (UV), indipendentemente e simultaneamente, e può generare dai dati tutti i prodotti seguenti.
| Canale VL | Sequenze polarimetriche |
|---|---|
| Immagini di total brightness | |
| Immagini a polarizzazione fissa | |
| Curve di luce | |
| Canale UV | Immgini in modalità analogica |
| Acquisizioni in modalità photon counting | |
| Mappe degli offset | |
| Entrambi | Immagini di temporal noise |
| Mappe di log di raggi cosmici e particelle energetiche solari |
I dati Metis verranno elaborati ai seguenti livelli:
- LIVELLO 0: dati non calibrati (in unità di DN) ottenuti da pacchetti di telemetria raggruppati, decompressi e formattati in formato FITS. Gli header FITS contengono solo le informazioni disponibili negli header dei pacchetti di telemetria.
- LIVELLO 1: dati non calibrati (in unità di DN). I file FITS contengono dati ingegneristici aggiuntivi estratti dai pacchetti di telemetria di house-keeping.
- LIVELLO 2: dati calibrati (in unità fisiche). Le correzioni di bias, dark current, flat field e vignettamento sono applicate insieme alla normalizzazione per il tempo di esposizione, alla regolazione del puntamento e alla calibrazione radiometrica. Vengono utilizzate tutte le informazioni orbitali e di assetto disponibili e le coordinate sono espresse in sistemi di coordinate scientifiche (WCS).
- LIVELLO 3: dati scientifici derivati da dati di livello 2 dopo analisi scientifica, ad es. mappe di densità elettronica e velocità del vento solare; mappe di Carrington; immagini filtrate; filmati.
Ulteriori informazioni sulla struttura dei file FITS di Metis e sugli schemi di elaborazione sono disponibili nel documento Solar Orbiter/Metis Data Product Description Document.
Sequenze polarimetriche
Il rivelatore VL acquisisce i 'frame' a un tasso constante e al tempo di integrazione del rivelatore. Ciascun 'frame' è acquisito a un diverso angolo di polarizzazione modificabile. La misura viene effettuata ciclicamente su un numero di angoli di polarizzazione specifici, producendo quindi un flusso di dati interlacciati; questo numero può assumere i valori di 3 o 4. La 'pipeline' per ridurre i dati a bordo è capace di calcoli di esecuzione ausiliari e di monitoraggio, per esempio, statistiche, rimozione di raggi cosmici (CR) e particelle energetiche solari (SEP), e individuazione di 'coronal-mass-ejection' (CME).
Infine, i 'frame' con la stessa polarizzazione sono mediati e compressi per inviare a Terra un set di immagini polarizzate a una cadenza specifica. Lo schema di acquisizione ha un minimo tempo di integrazione del rivelatore di 15 s.
Immagini di total brightness
Il rivelatore VL detector acquisisce e invia i 'frame' a un tasso costante e al tempo di integrazione del rivelatore. Il numero di angoli di polarizzazione può assumere solamente il valore 2. Tutti i 'frame' sono acquisiti cambiando la polarizzazione durante l'integrazione del rivelatore. La 'pipeline' per ridurre i dati a bordo è capace di calcoli di esecuzione ausiliari e di monitoraggio descritti sopra.
Infine, i 'frame' sono mediati e compressi per inviare a Terra una singola immagine a una cadenza specifica. Questo schema di acquisizione ha la limitazione di un minimo tempo di integrazione del rivelatore di 20 s.
Immagini a polarizzazione fissa
Il rivelatore VL acquisisce i 'frame' a un dato tempo di integrazione del rivelatore e li spedisce a un tasso costante. Questo schema di acquisizione è stato creato per eseguire acquisizioni a un alto tasso. Tutti i 'frame' sono ottenuti mantenendo l'angolo di polarizzazione allo stesso valore fissato. Tutti i calcoli ausiliari e gli agloritmi di monitoraggio sono disabilitati.
Infine, i 'frame' individuali sono compressi e inviati a Terra. Questo schema di acquisizione ha la limitazione di un minimo tempo di integrazione del rivelatore di 1 s e di un massimo numero di 64 frames. Al tempo di integrazione di 1 s e per 64 frames, il tempo totale di acquisizione è di circa 11 minuti, includendo il tempo di processamento.
Curve di luce
Durante l'acquisizione di una sequenza di 'polarized-brightness', il canale VL può anche fornire le curve di luce, ossia, otto serie temporali di brillanza calcolate mediando i conteggi rivelati nei pixels all'interno di 8 settori radiali del campo di vista di Metis. In qualunque momento sia abilitata la produzione delle curve di luce, anche questi Prodotti scientifici vengono scaricati insieme alla sequenze di 'polarized-brightness'.
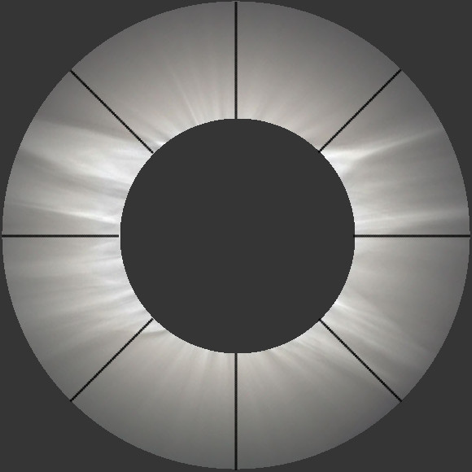
Campo di vista di Metis, con gli otto settori utilizzati per il calcolo delle curve di luce.
Immagini UV in modalità analogica
I 'frame' acquisiti dal rivelatore UV ad un tempo di integrazione costante, sono mediati in un processo a due-passi. Il primo è eseguito nell'hardware (pre-sum) ed il secondo via software (coadding). La 'pipeline' di processamento dei dati a bordo è capace di eseguire calcoli ausiliari e di monitoraggio, come per es., statistiche e rimozione di CR/SEP.
Infine, l'immagine risultante è compressa e inviata a Terra. Questo schema di acquisizione ha la limitazione di un minimo tempo di integrazione del rivelatore di 1 s.
Acquisizioni UV in modalità photon counting
In questo caso, l'APS è operativo continuamente, in modo nominale a un tempo di integrazione di 97 ms, ad es., il massimo tasso di 'frame' permesso per evitare sovrapposizioni degli' spot' di carica generati da ciascun fotone primario che incide sul rivelatore.
I dati di output vengono acquisiti in modo seriale dall'unità di 'photon-counting' (PCU) così da generare una finestra evento di 3×3 pixel che diamicamente 'spazza' la matrice APS. Ciascuna finestra è analizzata, per cercare la presenza di eventi il cui contenuto di carica stia entro i limiti appropriati e soddisfi un dato set di regole morfologiche. L'algortimo PCU soddisfa tre compiti: correzione dell'offset, rilevazione dei fotoni e generazione della lista dei fotoni. La PCU determinerà le coordinate del centroide degli eventi identificati e successivamente invierà un pacchetto contenente le coppie di coordinate e raccogliendo le informazioni sulla carica dei fotoni nella Metis Processing & Power Unit (MPPU).
Mentre si è nella modalità 'photon-counting', i dati Uv possono essere inviati in tre diversi formati di output:
- Lista di fotoni, se il tasso di conteggi è al di sotto di una soglia parametrizzata;
- Accumulazione, quando il tasso di conteggi è più alto della medesima soglia parametrizzata; in questa modalità la MPPU dnon genera la lista di eventi, ma raccoglie i dati in una matrice 1024×1024;
- Modalità Test, che fornisce il valore di ciascun pixel in una finestra 3×3 centrata sugli eventi dei fotoni rivelati, è usata per fornire diagnostiche e procedure di test capaci di verificare lo status della modalità operativa 'photon-counting/photon-list' e l'efficienza/funzionalità del rivelatore UV.
Mappe degli offset
Lo scopo di questa acquisizione è correggere per possibili variazioni di offset sulle catene pixel-electronic dell'APS durante la missione. Un set di N (N = 8, 16, 32, 64, 128) frame è acquisito, con un tempo minimo di esposizione (97 ms) e con l'intensificatore MCP spento. I frames sono quindi mediati con una media aritmetica pixel-per-pixel. Il frame mediato è spedito a Terra e allo stesso tempo immagazzinato a bordo, per essere usato nell'acquisizione in photon-counting come matrice di correzione dell'offset. La stessa mappa è immagazzinata in una slot di memoria separata come backup.
Immagini di temporal noise
Questa acquisizione è comune a entrambi i canali. Il rivelatore acquisisce un dato numero di frames a un dato tempo di integrazione del rivelatore e calcola la media e la deviazione standard per ciascun pixel del sensore. Per il canale VL, tutti i frames sono acquisiti mantenendo l'angolo di polarizzazione ad uno stesso valore fissato. Lo scopo di questa acquisizione è di monitorare periodicamente la performance del rivelatore. I due frames, uno con la media e l'altro con la deviazione standard, sono compressi e inviati a Terra. Per questa acquisizione, nessun calcolo ausiliario e processo di monitoraggio è attivo.
Mappe di log di CR/SEP
Questo prodotto è generato dall'algoritmo di correzione CR/SEP. Consiste nell'effettuare la differenza tra il frame corretto e non corretto, fornendo informazioni sulla posizione dei pixels colpiti da CR/SEP e sulla magnitudine della correzione applicata.